

Термин «автономные системы» часто используется (и часто используется неправильно) для описания систем, которые без ручного вмешательства могут изменять свое поведение в ответ на непредвиденные события во время работы. В этой статье представлено более полное определение.
Нет ничего нового в системе, которая реагирует на изменение входных данных в режиме реального времени. Автомобили, например, уже имеют значительное количество низкоуровневой автоматизации, такой как электронный контроль устойчивости (ESC) или антиблокировочная тормозная система (ABS). Хотя алгоритмы могут воздействовать на множество входных данных и достигать значительной сложности, входные данные сильно структурированы, а диапазон возможных действий ограничен. Напротив, беспилотный автомобиль должен иметь дело со значительно менее структурированными входными данными, которые требуют более широкого спектра реакций. Алгоритм должен реагировать на все виды транспортных средств, с которыми он может столкнуться, а также на пешеходов, геометрию дорог, погодные условия, неустойчивое поведение других и любое количество случайных объектов и событий, которые программисты не обязательно предвидели. Обычные системы автоматизации позволяют выполнять низкоуровневые процессы без вмешательства человека в нормальных условиях. Человеческие решения по-прежнему требуются для более сложных задач. Повышение автономии систем автоматизации заключается в постепенной передаче все большего числа этих задач системе.
Достижение автономной системы
Многие входы, необходимые для повышения автономности, уже доступны в цифровом виде. К ним относятся данные датчиков и процессов классической автоматизации, а также входные данные из множества других источников, включая камеры наблюдения, погодные и рыночные данные. Искусственный интеллект (ИИ) — ценная технология для обработки этих данных. Существует тенденция путать ИИ с автономными системами. ИИ — это технологическое средство, с помощью которого можно достичь определенного уровня автономии. Автономия — это цель, которой может помочь ИИ.
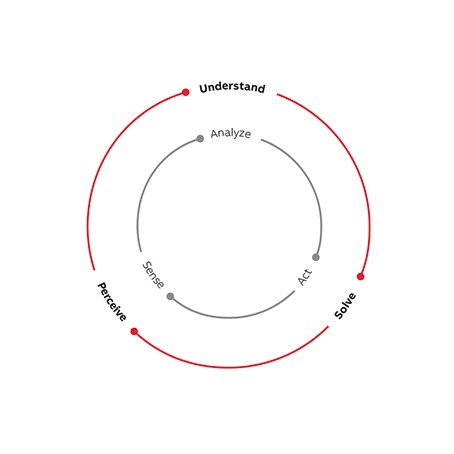
Система автоматизации обычно выполняет точно определенные инструкции в рамках ограниченного объема операций. Классический цикл управления можно разбить на фазы восприятия, анализа и действия. Например, двигатель работает слишком быстро (чувство), контроллер решает уменьшить скорость (анализ) и уменьшает ток, подаваемый на двигатель (действие). Контур обратной связи автономной системы добавляет еще одну оболочку, применяя тот же принцип, но на более сложном уровне, охватывая также то, что неизвестно или не предвидится. Беспилотное транспортное средство идентифицирует препятствие (воспринимает), распознает, что может возникнуть потенциально опасная ситуация (понимание), и предпринимает корректирующие действия, изменяя скорость и траекторию транспортного средства (решение).
Уровни автономии
Чтобы определить цели перехода к автономным системам, важно установить таксономию, чтобы поставщики автоматизации и клиенты могли определить, где они находятся и где они хотят быть в краткосрочной, среднесрочной и долгосрочной перспективе. В этой статье предлагается таксономия автономии с шестью уровнями, вдохновленная определениями из автомобильной промышленности. Он в основном основан на двух измерениях: объеме автоматизированной задачи и роли человека. Таксономия начинается с отсутствия автономии (уровень 0, на этом уровне может все еще иметь место широкая низкоуровневая автоматизация) и поднимается до полностью автономной работы (уровень 5), на котором все решения и действия выполняются системой.
На уровне 1 системы обеспечивают оперативную помощь посредством поддержки принятия решений или удаленной помощи. Примеры включают программное обеспечение, которое помогает локализовать подземные шахтные транспортные средства или обеспечивает ситуационную осведомленность для судов с помощью дополнительных датчиков, таких как LIDAR и радар.
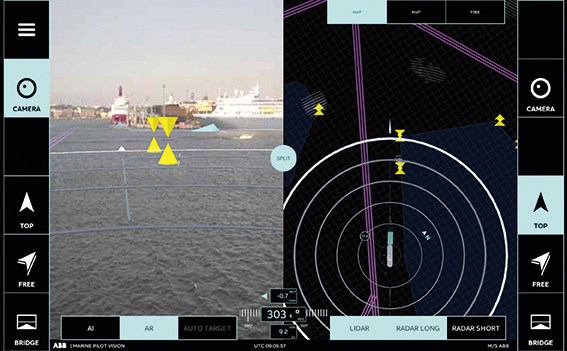
Морской пилот ABB Ability TM Vision.
Уровень 2 граничит со случайной автономией в определенных ситуациях. Здесь система автоматизации берет на себя управление в определенных ситуациях, когда и по запросу человека-оператора в течение ограниченного периода времени. Люди по-прежнему принимают активное участие, следя за состоянием работы и определяя цели для ситуаций с ограниченным контролем. Одним из примеров является автопилот для судов, который по запросу берет на себя управление скоростью и навигацией по заранее определенному маршруту, но при этом действующий капитан по-прежнему несет полную ответственность.
На уровне 3 автоматизированные системы берут на себя управление в определенных ситуациях. Это также можно назвать «ограниченной автономией». Люди, так сказать, «подписываются», подтверждая предложенные решения или выступая в качестве запасных вариантов. Обязательным условием является полный и автоматизированный мониторинг окружающей среды. Примером может служить автономное бурение с последующей автономной зарядкой взрывчатых веществ в подземной шахте. При такой настройке (удаленный) оператор все еще может быть предупрежден в исключительных ситуациях и может взять на себя или подтвердить предложенную стратегию разрешения проблем.

Роботизированное зарядное устройство ABB для подземной шахты (изображение из проекта ЕС SIMS).
На уровне 4 система полностью контролирует ситуацию в определенных ситуациях и учится на своих прошлых действиях, например, чтобы иметь возможность лучше прогнозировать и решать проблемы самостоятельно. Примером такой ситуации является автономная стыковка корабля, при которой капитан выполняет не более чем надзорную роль.
На верхнем уровне этой таксономии находится Уровень 5. Полная автономная работа происходит во всех ситуациях. Взаимодействие с пользователем не требуется, и люди могут полностью отсутствовать. Сегодня это желательно, но, например, электрическая самоходная горнодобывающая машина для полной автономной погрузки руды будет иметь большие преимущества в плане безопасности и производительности.
Существует важное разграничение между уровнями 0, 1 и 2, с одной стороны, и уровнями 3, 4 и 5, с другой стороны. В первой группе есть некоторая способность к автономным действиям, но они ограничены по масштабу, и человек, по сути, все время остается под активным контролем. Три высших уровня отличаются тем, что человек в лучшем случае играет пассивную роль.
Правовые вопросы, возникающие при возникновении проблем, если система находится под контролем, еще полностью не решены. Здесь можно провести параллели с авариями с участием беспилотных автомобилей. Ситуация с правовой и общественной приемлемостью все еще развивается.